This project addresses the waste management challenges posed by lithium-ion batteries (LIBs) used in electric mobility. After their second life, recycling represents not only the most environmentally friendly alternative for batteries, but also a natural and economic resource since the raw materials contained in LIBs can be valorised for further manufacturing. This is particularly relevant in the EU, which is a net importer of critical raw materials while up to 40% of the EVs are sold in Europe. Therefore, a solid recycling industry can become the European mining equivalent, promoting both environmental and economic benefits to the EU region.
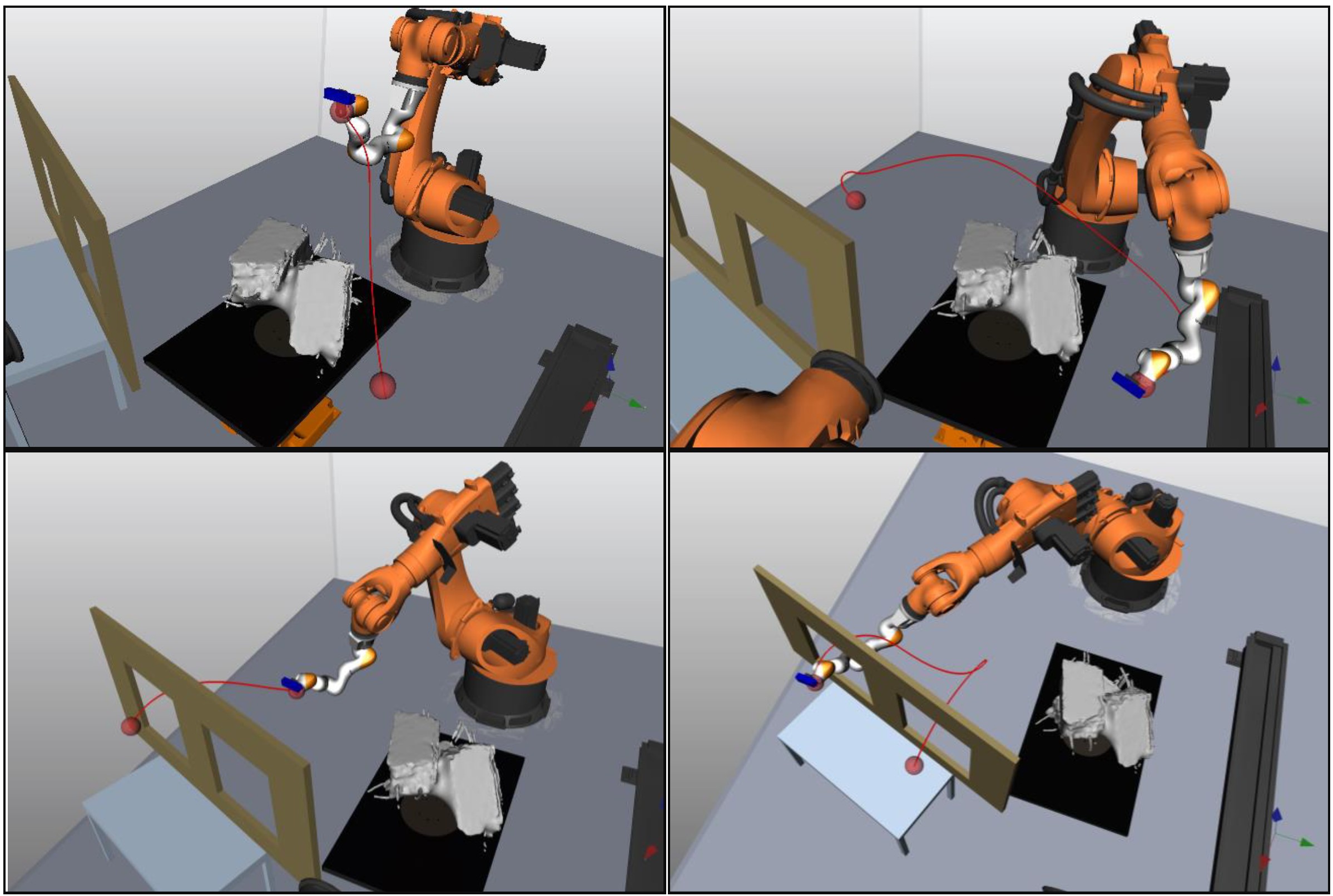
Advanced motion planning and control of long-reach high-degree-of-freedom robot arm. This project addressed Sellafield, TEPCO, and UKAEA’s requirements for computational methods for assisting in control of many-jointed long-reach manipulators. The key challenge was developing algorithms which can automatically plan exceedingly complex motions, of large numbers of joints, to deliver a desired end-effector motion, while also avoiding collisions with obstacles. A secondary challenge was to show how such obstacles can be captured via a wrist mounted camera using 3D computer vision concepts, and how these visually acquired obstacles can be incorporated into the motion planner.
FundingGBP 42 million (including industry contributions)
The National Centre for Nuclear Robotics, established in 2018, is a consortium of eight universities and affiliated partners tasked with finding fresh solutions to the well-established problem of nuclear waste. Nuclear decommissioning and the safe disposal of nuclear waste is a global problem of enormous proportions.
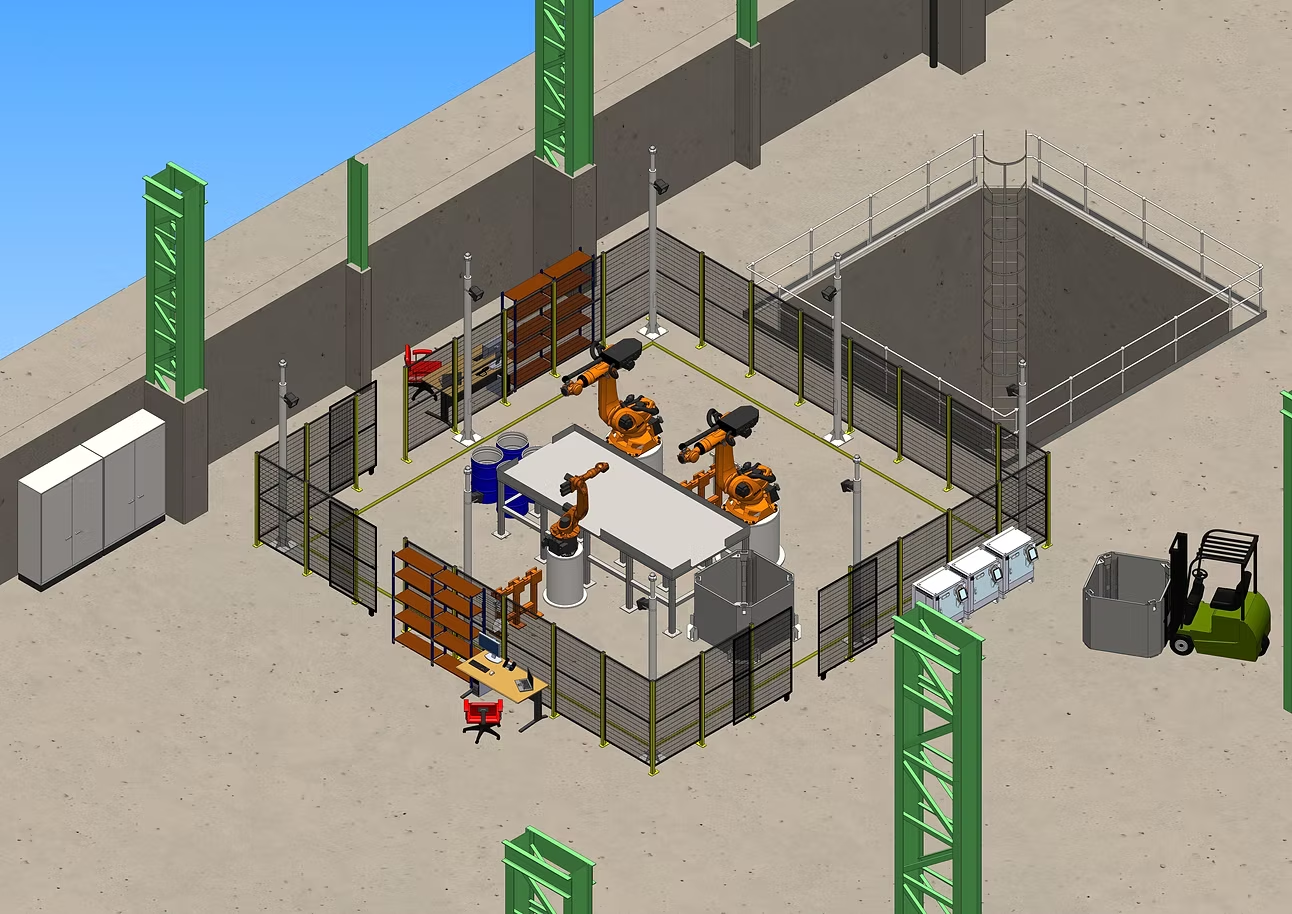
The overall aim of the ReLiB project is to understand the conditions required to ensure the sustainable management of lithium-ion batteries when they reach the end of their useful life in electric vehicles. ERL leads the automation of the ReLiB project, which focuses on robotising the process of testing, disassembly, and sorting EV batteries. The team has developed adaptive control strategies for multi-robot systems to collaboratively disassemble various EV battery packs from pack level to cell level. The Sustainable Robotic Centre (SRC) is the heart of ERL's pioneering industrial-scale robotics work.
The RoMaNS (Robotic Manipulation for Nuclear Sort and Segregation) project is a European Union Horizon 2020 initiative designed to improve nuclear waste processing efficiency. It developed advanced, radiation-resilient robotics, specifically haptic, master-slave systems, to enable autonomous and shared control for sorting and handling hazardous, complex materials.
RNE was a five-year collaborative research programme that brought together robotic and nuclear engineering experts to make the step changes in RAS capability that were needed to overcome the challenges facing the UK and international nuclear industries.
Robotic system for retrieval of contaminated materials from hazardous zones. This is a collaborative project, between UK (University of Birmingham and National Nuclear Laboratory) and South Korea (Korea Atomic Energy Research Institute), which is developing new robotics technologies for nuclear remediation. This project is an initiative of the UK-Korea Civil Nuclear Collaboration Program, which has been jointly funded by both countries.
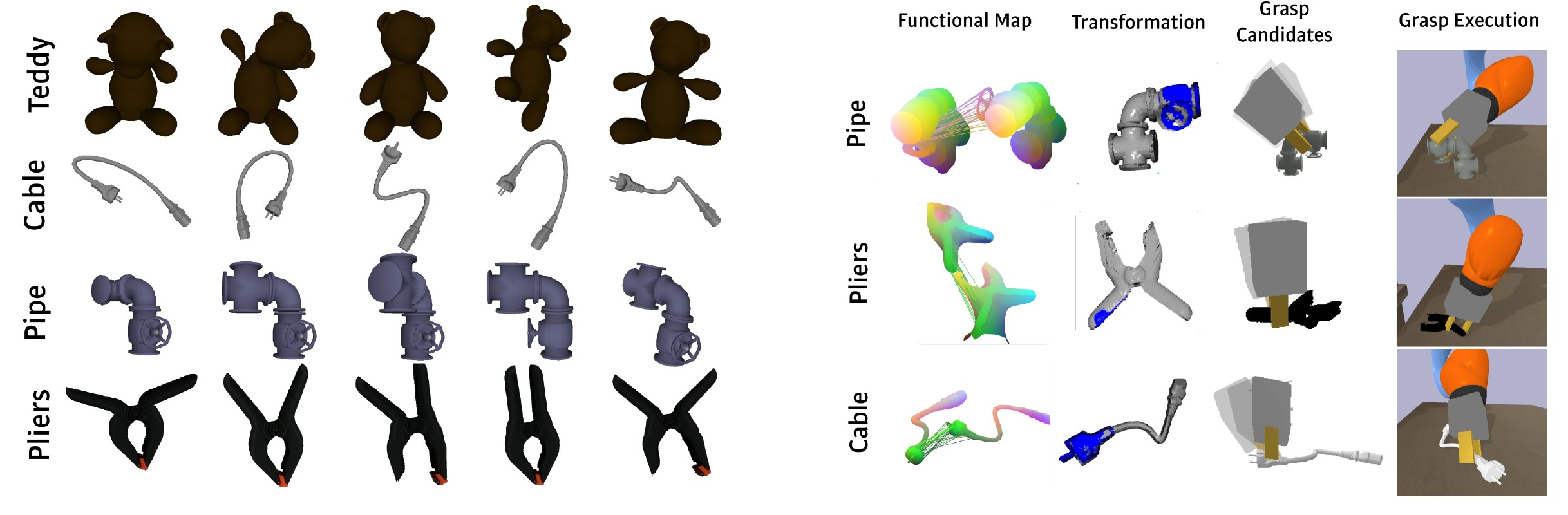
Perception-guided robust and reproducible robotic grasping and manipulation.
Additional Projects (PI/Co-I: Rustam Stolkin)
RECREATEEPSRC funding (GBP 6.4 million) - Co-I
Met4TechEPSRC funding (GBP 4.4 million) - Co-I
InnovateUK KTPGBP 250,000 with KUKA - PI
PhD Studentships5 nuclear-sponsored, GBP 0.5m+
RECREATE (REcycling CRitical Elements in Advanced Technologies for the Environment) and UKRI Interdisciplinary Circular Economy Centre for Technology Metals (Met4Tech) are EPSRC-funded initiatives. The InnovateUK KTP supports deployment of KUKA industrial robot arms for UK nuclear industry needs. Five nuclear-sponsored robotics/sensing PhD studentships have also been secured.